
1、日本的番茄采摘机器人
日本的果蔬采摘机器人研究始于1980年,Kawamura等人开展了番茄采摘机器人的研究。他们利用红色的番茄与背景(绿色)的差别,采用机器视觉对果实进行判别,研制了番茄采摘机器人。该机器人有5个自由度,对果实实行二维定位。由于不是全自由度的机械手,操作空间受到了限制,而且坚硬的机械爪容易造成果实的损伤。
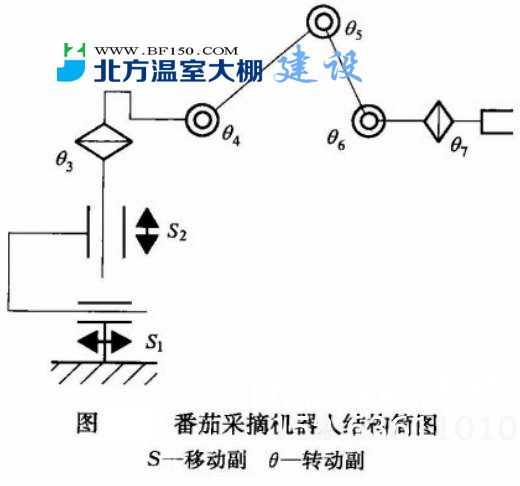
日本冈山大学的Kondo N.等人研制的番茄采摘机器人,由机械手、末端执行器、行走装置、视觉系统和控制部分组成,如下图所示。用彩色摄像头和图像处理卡组成的视觉系统,寻找和识别成熟果实。由于番茄的果实经常被叶茎遮挡,为了能够灵活避开障碍物,采用具有冗余度的7自由度机械手。为了不损伤果实,其末端执行器设计有2个带有橡胶的手指和1个气动吸嘴,把果实吸住抓紧后,利用机械手的腕关节把果实拧下。行走机构有4个车轮,能在田间自动行走,利用机器人上的光传感器和设置在地头土埂的反射板,可检测是否到达土埂,到达后自动停止,转向后再继续前进。该番茄采摘机器人从识别到采摘完成的速度大约是15s/个,成功率在70%左右,成熟番茄未采摘的主要原因是其位置处于叶茎相对茂密的地方,机械手无法避开叶茎障碍物。因此需要在机器手的结构、采摘工作方式和避障规划方面加以改进,以提高采摘速度和采摘成功率,降低机器人自动化收获的成本,这样才可能达到实用化。
2、日本的茄子采摘机器人
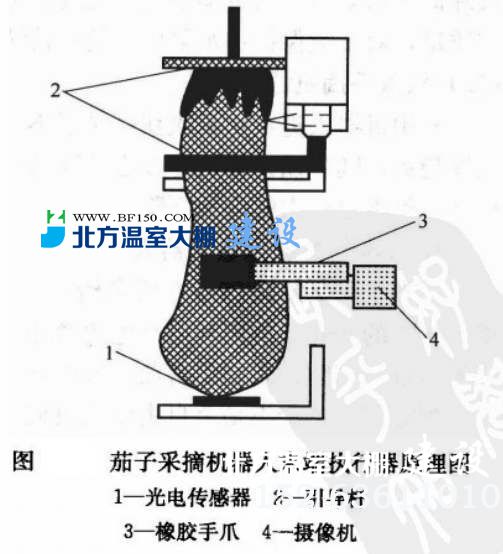
日本国立蔬菜茶叶研究所与岐阜大学联合研制了茄子采摘机器人。机器人由CCD机器视觉系统、5自由度工业机械手、末端执行器以及行走装置组成,作业对象是温室中按照V形生长方式种植的Senryo-2号茄子。该机器人的末端执行器设计复杂,包括4个手指、2个吸嘴、2个诱导杆、气动剪子和光电传感器,如下图所示。工作中,利用模糊视觉反馈系统引导末端执行器靠近果实,完成采摘作业。该机器人在实验室中进行了试验,采摘成功率为62.5%,工作速度为64.1s/个。影响成功率的主要原因是机器视觉系统对采摘位置的判断不正确。同时,视觉系统占用了72%的工作时间(46.1s),也是影响采摘效率的主要因素。
3、日本的甘蓝采摘机器人
日本国立农业研究中心的Murakami等人研制了甘蓝采摘机器人。由极坐标机械手、4个手指的末端执行器、履带式行走装置和CCD机器视觉系统组成,整个系统采用液压驱动。系统利用人工神经网络(NN算法)提取果实的二维图像,采用模板匹配的方法识别合格的甘蓝。农田试验表明,采摘的成功率为43%,工作速度为55s/个。影响成功率的主要原因是光照条件的不稳定、超声波测距传感器的误差、叶子的遮挡以及机械故障等。
4、日本的葡萄采摘机器人
日本冈山大学研制出了一种用于果园棚架栽培模式的葡萄收获机器人。其机械部分是一个具有5个自由度的极坐标机械手,具有4个旋转关节(其中腰部1个、肩部1个、腕部2个)和1个棱柱形的直动关节。这种结构使得机器人在葡萄架下行走时能够有效地工作,旋转关节可以用不同的速度旋转,直动关节可以采用简单的控制方法来获得较高的速度。腕部的2个旋转关节非常有用,它可以保证末端执行器水平和垂直接近葡萄,即使葡萄束倾斜也可以达到目的。而且,为了提高使用率,更换不同的末端执行器,还可以完成喷雾、套袋和剪枝等作业。
5、荷兰的黄瓜采摘机器人
1996年,荷兰农业环境工程研究所(IMAG)研制出一种多功能黄瓜收获机器人。该研究在荷兰2hm2的温室里进行,黄瓜按照标准的园艺技术种椬并把它培养为高拉线缠绕方式吊挂生长。该机器人利用近红外视觉系统辨识黄瓜果实,并探测它的位置。机械手只收获成熟黄瓜,不损伤其他未成熟的黄瓜。采摘通过末端执行器来完成,它由手爪和切割器构成。机械手安装在行走车上,行走车为机械手的操作和采摘系统初步定位。机械手有7个自由度,采用三菱公司(Mitsubishi)RV-E26自由度机械手,另外在底座增加了一个线性滑动自由度。收获后黄瓜的运输由一个装有可卸集装箱的自走运输车完成。整个系统无人干预就能在温室工作。试验结果为工作速度10s/根,在实验室中效果良好,但由于制造成本和适应性的制约,还不能满足商用的要求。
6、英国的蘑菇采摘机器人
英国Silsoe研究院研制了蘑菇采摘机器人,它可以自动测量蘑菇的位置、大小,并选择性地采摘和修剪。它的机械手包括2个气动移动关节和I个步进电机驱动的旋转关节。末端执行器是带有软衬垫的吸引器。视觉传感器采用TV摄像头,安装在顶部用来确定蘑菇的位置和大小。采摘成功率在75%左右,采摘速度为6.7个/S,生长倾斜是采摘失败的主要原因。如何根据图像信息调整机械手姿态动作来提高成功率和采用多个末端执行器提高生产率是亟待解决的问题。

图:我国 中国农业大学研制的果蔬采摘机器人
(作者:瑞雪 安徽 北方温室大棚建设)





